Req 4b — Sketch the System
This is the point where your robot stops being an idea and becomes a plan. A strong design shows how the parts connect, what the robot needs to sense, and how it will move in more than one way. That last part matters because degrees of freedom means the robot can move through at least two independent motions, not just roll straight ahead.
Start with the big picture
Your design should answer four questions:
- What is the frame or structure?
- How does it move or act on the world?
- What sensor information does it use?
- What motions count as its degrees of freedom?
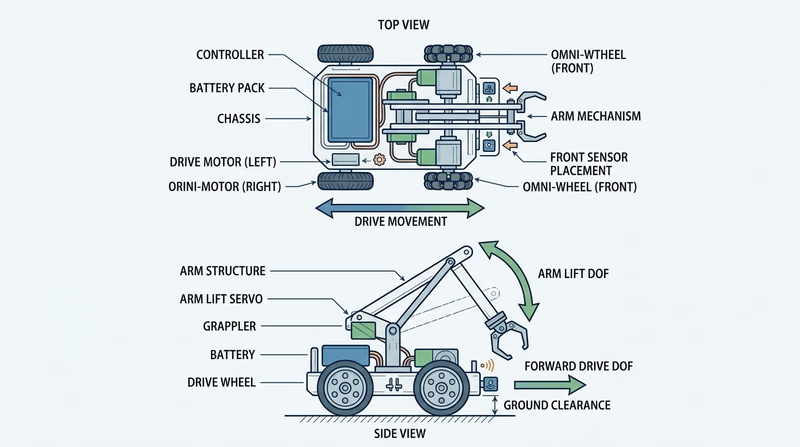
For a small drive robot with an arm, one degree of freedom might be forward-and-back drive movement, and another might be the arm lifting up and down. For a robotic arm, one degree of freedom might be shoulder rotation and another might be gripper open-and-close.
What “2 degrees of freedom” means
A degree of freedom is one independent way a system can move. If one motor motion changes and another can still change separately, you probably have multiple degrees of freedom.
Examples:
- Drive + arm lift
- Arm shoulder + elbow joint
- Turret rotation + launcher angle
- Lift motion + claw open/close
That does not mean you need two fancy arms or a complex humanoid robot. It means your design should do more than one distinct motion in a useful, controllable way.
🎬 Video: Methods Robots Use to Move (video) — https://youtu.be/T0JeYyU7R-c?list=PLHGEvyG5wuthXQZzTc-mLwFrP5F6_1Lce
🎬 Video: Robotics: Degrees of Freedom (video) — https://youtu.be/55O-DGeoFic?list=PLHGEvyG5wuthXQZzTc-mLwFrP5F6_1Lce
What to draw and describe in your notebook
Your notebook entry should include more than one sketch if needed. A side view, top view, and close-up of a mechanism can be more helpful than one crowded drawing.
Include labels for:
- battery and controller location
- motors or servos
- sensors
- drive system or mechanism
- important dimensions
- where the robot will hold, lift, push, or detect something
Add a short written description under the sketch that explains how the parts work together. Imagine that another Scout had to build your robot from your notes.
Design review questions
Use these before you start building
- Stability: Will the robot tip when the arm lifts or the mechanism extends?
- Access: Can I reach the battery, controller, and wiring easily?
- Sensor placement: Can the sensor actually “see” or detect what it needs to detect?
- Simplicity: Am I solving the task with the fewest moving parts that still work?
- Buildability: Do I have the parts and tools to make this design real?
Your plan is on paper. Next, turn those drawings into real parts and a working prototype.